L298 Variklių priedėlis (SHD-L298N)
")
- Pašalinti šia prekė iš man patinkančių
- Pridėti šia prekė prie man patinkančių
- Siųsti draugui
- Spausdinti
Siųsti draugui
L298 Variklių priedėlis (SHD-L298N)

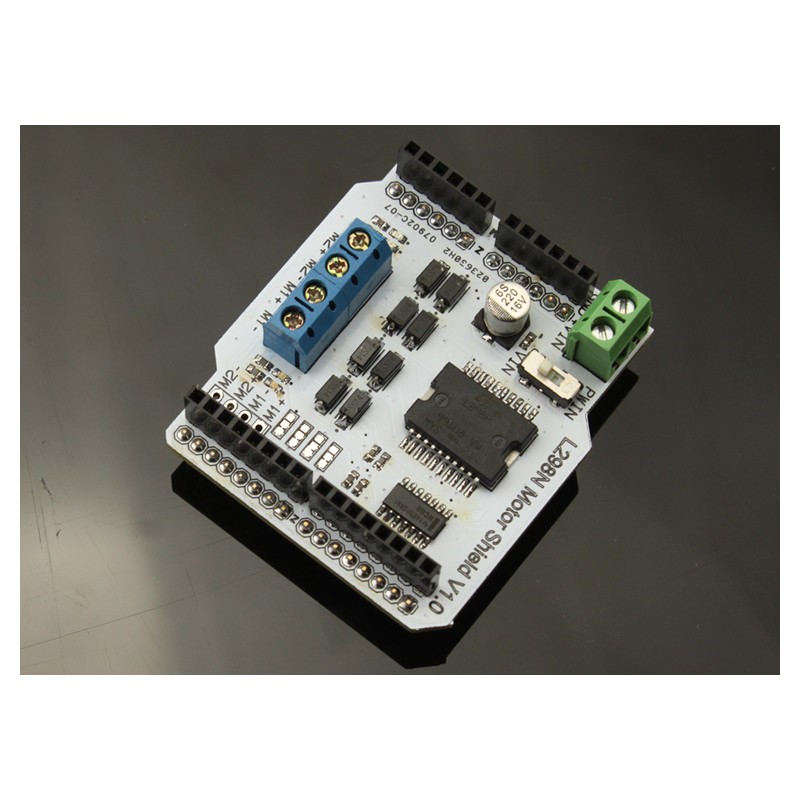
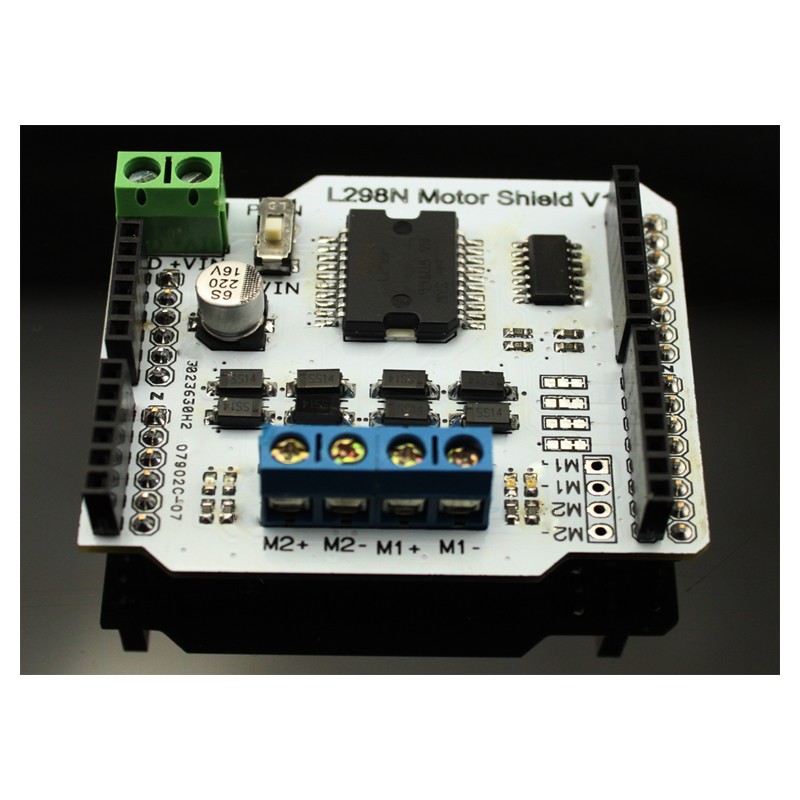
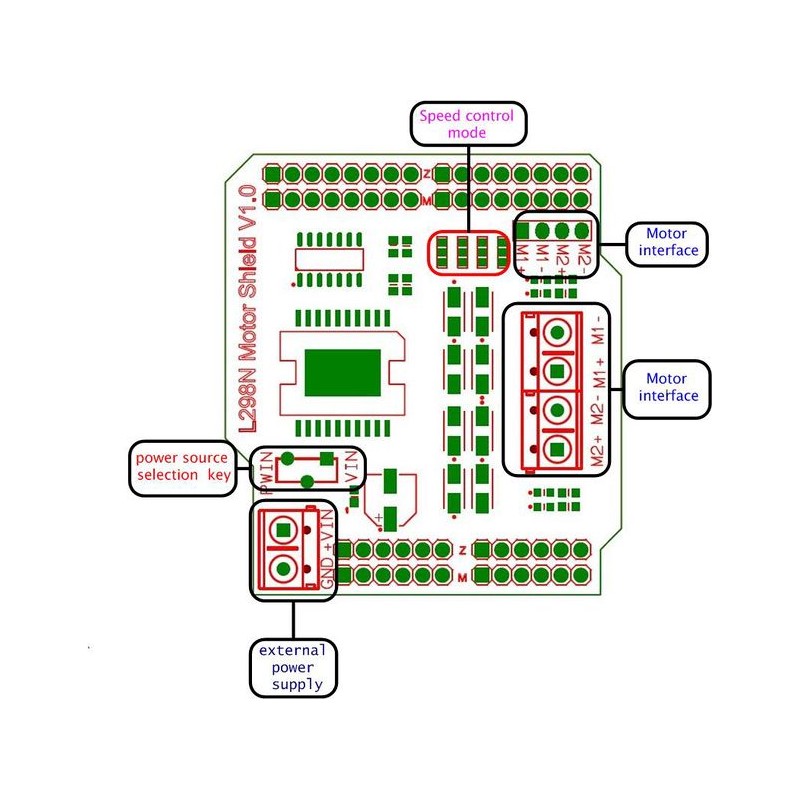
Šis priedėlis gali valdyti žymiai galingesnius el. variklius nei L293D priedėlis (iki 2A kiekvienam varikliui, įtampa 4.8-35 V). Priedėlis vienu metu gali valdyti 2 DC tipo variklius, beto priedėlis turi jungtis kito priedėlio ant jo viršaus uždėjimui.
Gavėjas :
* Privalomi laukai
L298 Variklių priedėlis (SHD-L298N)
Šis priedėlis gali valdyti žymiai galingesnius el. variklius nei L293D priedėlis (iki 2A kiekvienam varikliui, įtampa 4.8-35 V). Priedėlis vienu metu gali valdyti 2 DC tipo variklius, beto priedėlis turi jungtis kito priedėlio ant jo viršaus uždėjimui.
Pirkdami šią prekę galite gauti iki 1 premijos tašką. Jūsų krepšelis bus 1 taškas kurį(-uos) galite konvertuoti į nuolaidų kuponą už 0,20 €.





























Atsisiunčiami failai
Programų pavyzdžiai
Varikliai prijungti prie priedėlio valdomi PWM signalu
Varikliai prijungti prie priedėlio valdomi PLL signalu